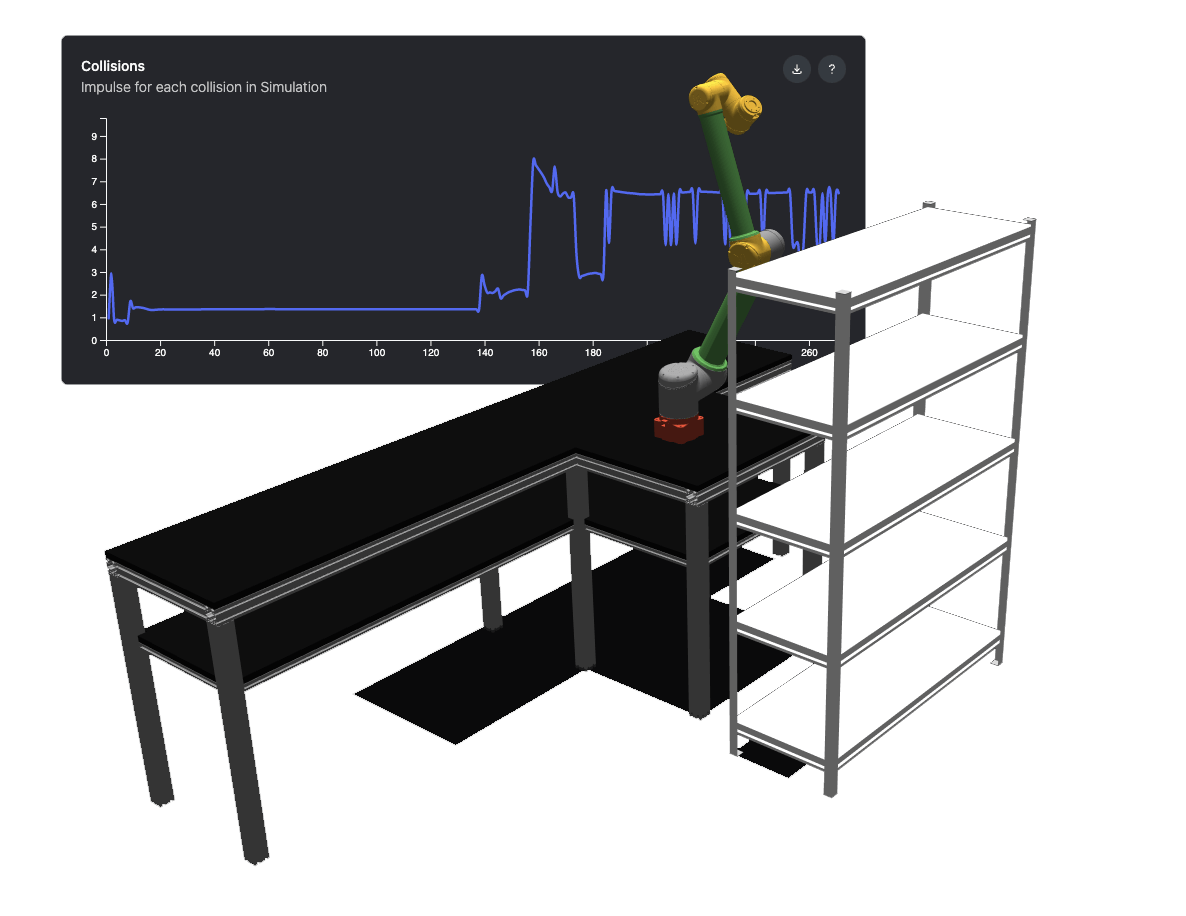
Simulate _in the Browser.
Real Mechanical Models
Test your Real Mechanical Designs by directly linking them from your CAD SoftwareNo Downloads
Use our Simulator entirely online in your browser with no downloads necessaryAdvanced Simulations
Program custom behaviour with our API to simulate real robot interactions and complex motion